Introdução
- Para interagir com o mundo físico precisamos de motores
- Existem vários tipos de motores elétricos. Ex.: AC e DC.
- Motores DC:
- Motor DC com escovas (brushed DC)
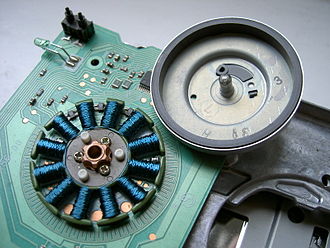
- Motor DC sem escovas (brushless DC)
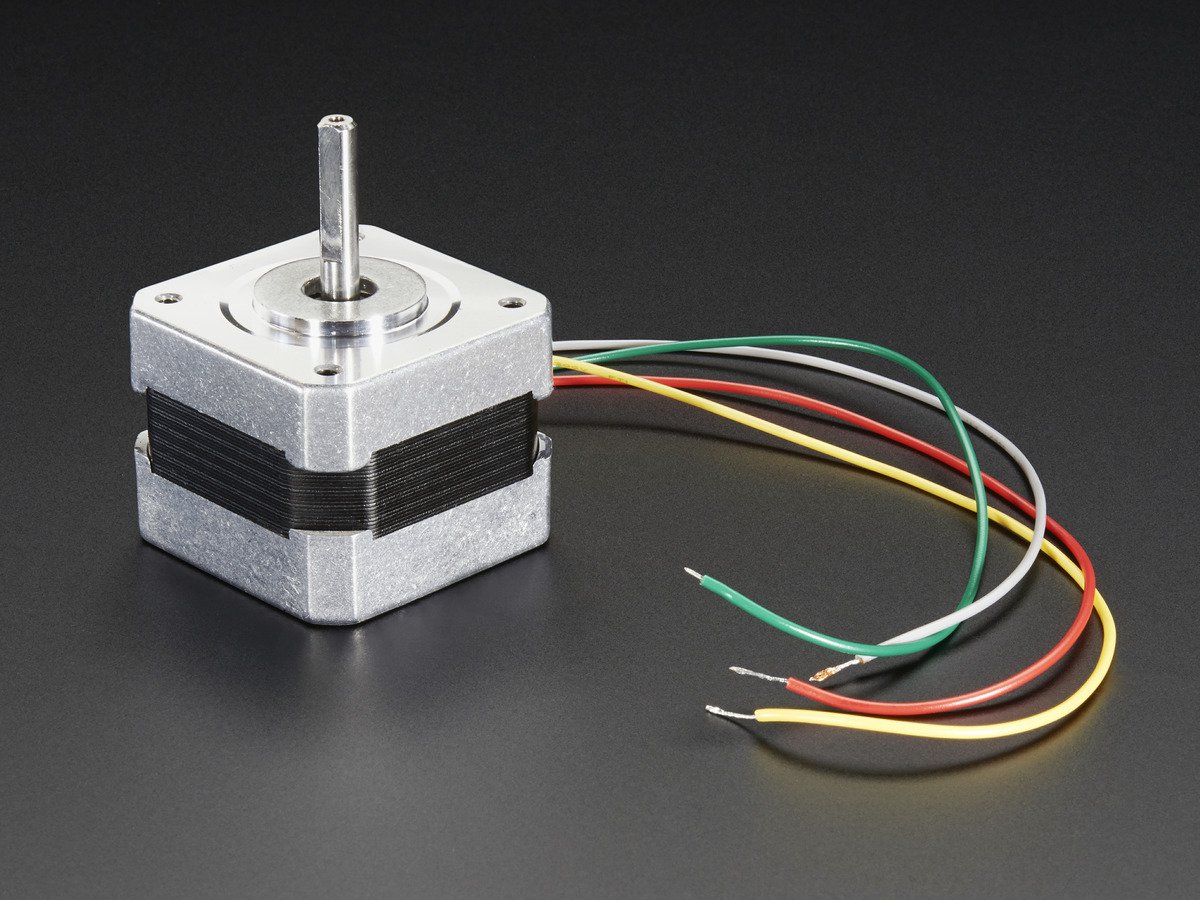
- Motor de passos (stepper motor)

Motor DC

Servo motor
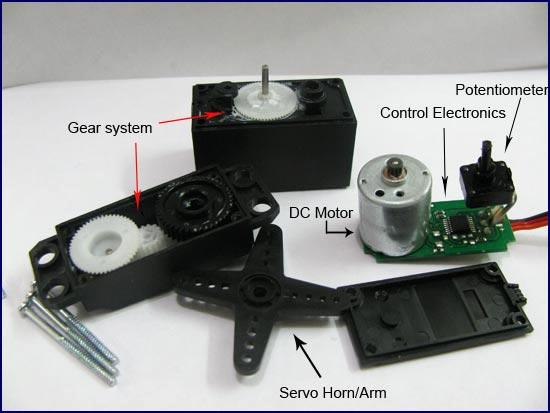
Servo
#include <Servo.h>servo.attach(pin): Indica qual o pino de comunicação com o Servoservo.write(angle): Informa a nova posição para o servoservo.read(angle): Recebe o último ângulo informado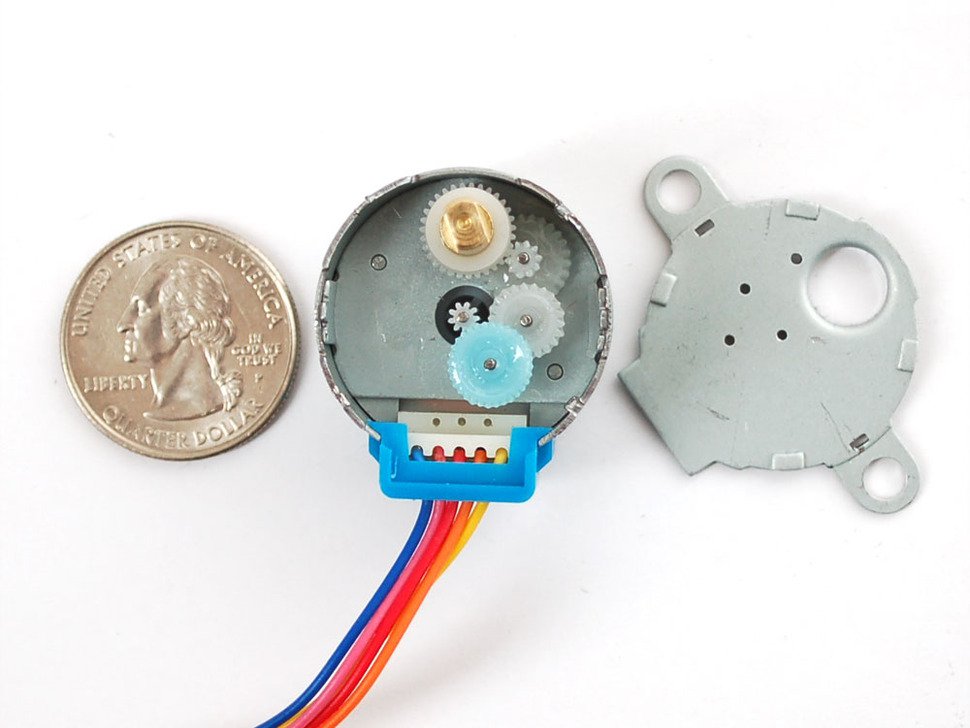
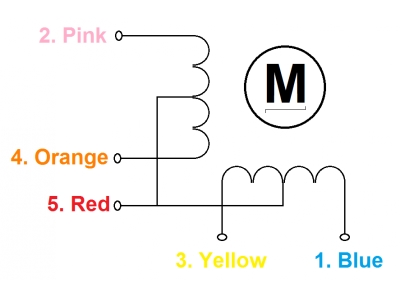
#include <Stepper.h>stepper.Stepper(steps, pin1, pin2, pin3, pin4): Número de passos por volta e pinos utilizadosstepper.setSpeed(rpm): Ajuste da velocidade de rotação em RPMstepper.step(steps): Dá um determinado número de passos